GUANGZHOU HAOZHI INDUSTRIAL CO., LTD.
GUANGZHOU HAOZHI INDUSTRIAL CO., LTD.
- Home
- About Us
-
Products
-

Machining center series
-

Engraving and Milling Spindle
-

Dental Milling Spindle
-
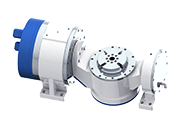
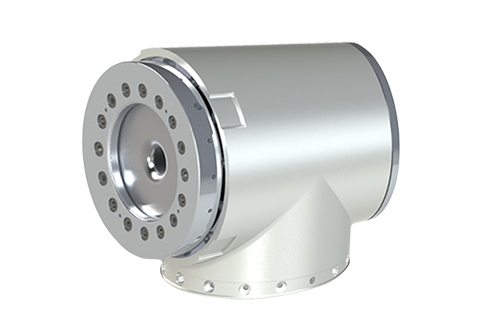
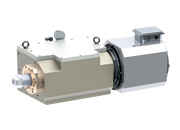
Rotary Table
-

Reducer
-

Core functional parts of the robot
-

PCB Spindle
-

Glass Grinding Spindle
-

Belt Driven and Direct Driven Spindle
-

Super Finish Spindle
-

Motorized spindle series for drilling and tapping center
-
Hydraulic static spindle series
-

Grinding Spindle
-

Lathe Spindle
-

Woodworking Spindle
-

Tool Holder
-

Collet
-
Linear motor series
-

Automated fixture (outside)
-

Automated fixture (inside)
-

Digital Controls
-

Servo Motor
-

Bending machine control system
-

Servo Driver
-

Fuel cell compressor
-
- Service
- Investor Relations
- News
- Contact Us